Summary
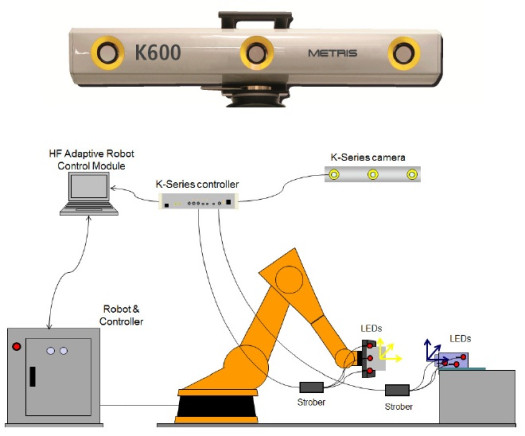
In work package 3 of the COMET project, the adaptive tracking system for industrial robots (ATIR) was
developed. The aim is to achieve an accurate and cost effective tracking system and methods/algorithms for real-time correction of robot to compensate for errors during milling with the robot. The work is mainly done by NikonMetrology NV. The tracking concept is built on top of the existing K Series tracker from Nikon. The K-Series system is a 3 linear CCD camera infra-red LED measurement system. LEDs are attached to the robot and the base, which allows the tracker to track the positions of both. The position of a ‘TOOL’ frame with respect to a ‘BASE’ frame is calculated from LED positions and from that the error can be derived when comparing to the programmed path. The static solution existed before COMET, the dynamic solution to achieve this while machining a component did not.
The ATIR concepts have been proven to work in the COMET demonstrators on several levels, however would need more work before being at an acceptable exploitation level as a stand-alone product. The experience at Nikon Metrology BV on static, quasi-static and real-time correction of robot positions through the use of K-Series tracker is available for other applications and markets. The best to access the knowledge is to get in contact directly with Nikon Metrology BV to see how the available knowledge can be applied to your business needs.
More information & hyperlinks
Search
Organisations
- Not specified